Germany
Germany Italy
Italy USA
USA South Korea
South Korea UK
UK India
India France
France China
China Japan
JapanRobot
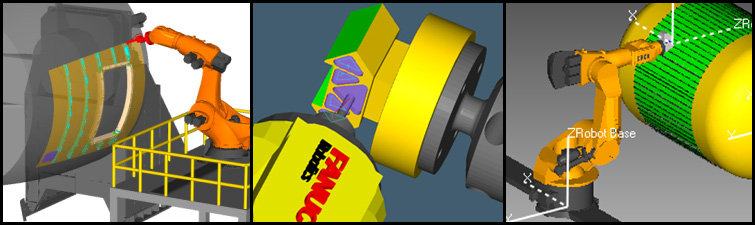
VERICUT simula il movimento del braccio robotico articolato a sei-assi dei principali costruttori di robot quali Fanuc, Kuka, ABB, Kawasaki, Motorman e altri ancora. VERICUT supporta anche robot che hanno assi addizionali esterni. Ad esempio i robot montati su un asse lineare (o parte di un asse rotante) che presentano un incremento significativo della capacità, portata, rigidità, velocità e precisione propria del robot.
Oltre alla simulazione, VERICUT può essere utilizzato per mettere a punto il movimento dei robot e il post-processore. VERICUT calcola le posizioni dei nodi dalla posizione e dall’orientamento della punta utensile e quindi post-processa per lo specifico linguaggio di programmazione del robot. La maggior parte dei robot sono programmati per “auto-apprendimento”. La programmazione off-line è preferita quando ci sono molti movimenti, quando servono posizioni precise o quando il processo debba essere controllato o tracciabile.
Attività specifiche di programmazione off-line sono:
- Taglio o rifilatura
- Foratura e fissaggio
- Posa nastro composito